


Quick Tip: Simulate Universal Robots Programs Offline with URsim
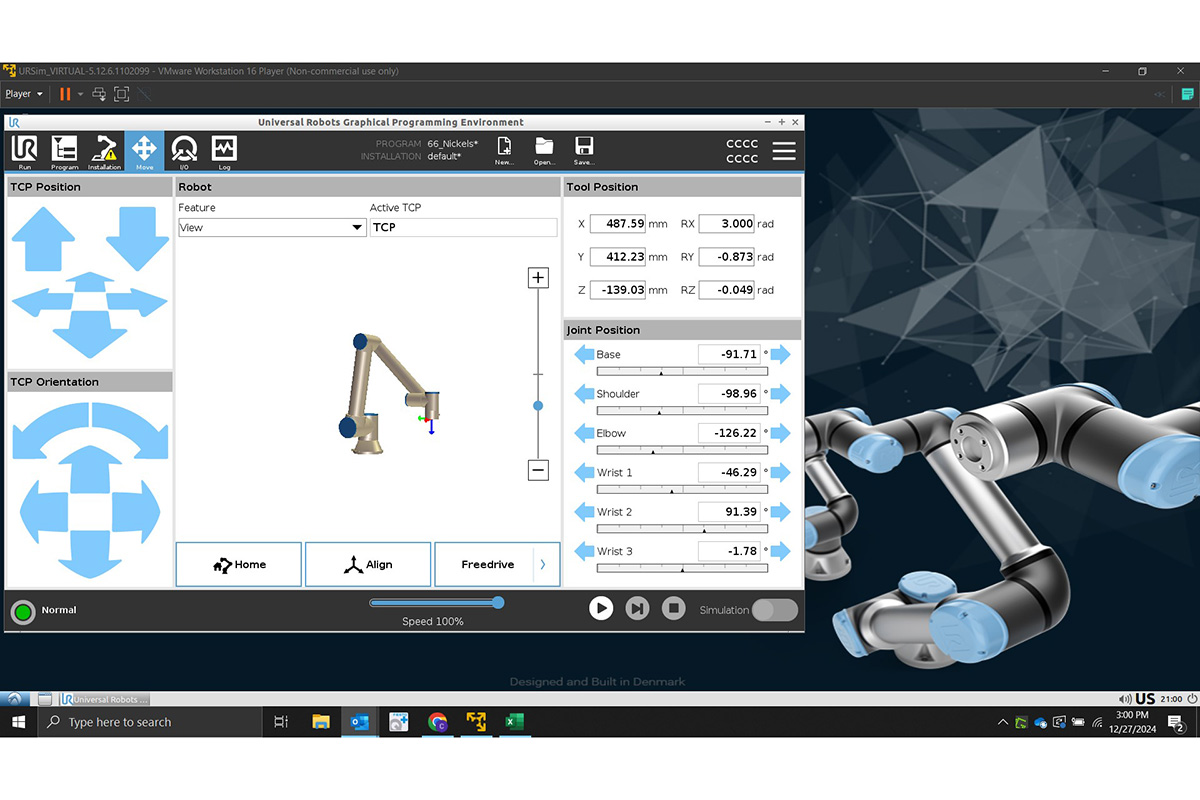
They call it URSim and it’s a simulation of the complete Polyscope software. It is intended for offline programming and simulation of robot movements. The software runs on a VMWare virtual machine. This enables you to run the Linux based robot software, on a Window computer.
You can…
Simulate robot movements
Cycle time calculations
Develop efficient movements
Blend Movements
Adjust Speeds
Now you can get a head start on laying out your program, making variables, and doing some file management ahead of time. Leaving valuable hands on time with the robot for more important tasks.

Share on Facebook

Share on X

Share on LinkedIn
My Wish List
Last Added Items
You have no items in your wish list.
Recent Posts




